4 Bedienung
Erstellt: DL6GL, 05.05.2017, letzte Änderung 13.02.2020
| « 3 ATU-TRX-Kommunikation | TOP | » 5 Aufbau |
Die Steuerung des Antennenkopplers erfolgt komplett über das Steuergerät.
4.1 Bedienelemente
Um im Normalbetrieb auch ständig die TX-Leistung und das SWR anzuzeigen, wird ein 4x20-LCD verwendet. Die Wahl fiel wegen der handlichen Abmessungen auf das EA DIP204-4 von Electronic Assembly (z.B. reichelt.de). Mittlerweise wurde dieses 5V-LCD vom Hersteller durch den 3,3V-Typ EA DIP203-4 ersetzt. Eine angepasste Adapterplatine ist im Download zu finden. Die Besonderheiten dieser Displays sind hier beschrieben.
Neben dem Display sind auf der Frontplatte fünf Taster, ein Drehencoder und fünf LED angeordnet. Diese ermöglichen den Betrieb und die Einstellung der Betriebsparameter ohne Finger- und Hirnakrobatik infolge Mehrfachbelegung von Tasten.
Die 5 Taster zur Bedienung sind:
- Mode zur Einstellung der jeweiligen Betriebsart
- Tune Bestimmung der über PTT bzw. Mute reduzierten Sendeleistung für die ATU-Relaisumschaltung, Anstoßen der vollautomatischen Abstimmung im Automatic-Mode
- Store zum Abspeichern optimierter Bandeinstellungen
- Reset zum Zurücksetzen von Einstellungen im Manual-Mode
- Lock zum Sperren der ATU-Einstellungen gegen ungewollte Änderungen.
Daneben erfüllen die Taster im Setup-Modus weitere Funktionen, die im Display angezeigt werden.
Mit dem Drehencoder werden hauptsächlich die Induktivitäten und Kapazitäten im Tuner eingestellt, daneben im Setup verschiedene Zahlenwerte.
Die LED zeigen bestimmte Betriebszustände zur Erleichterung der Bedienung an.
4.2 Betriebsarten Übersicht
Eine ausführliche Bedienungsanleitung ist im Download zu finden.
Mit dem Taster "Mode" sind fünf Betriebsarten wählbar. Sie werden durch wiederholtes Tasten durchgetaktet.
- "Auto": Der ATU stellt die Abstimmdaten (L, C und Hoch-/Tiefpass) aus dem EEPROM mit Hilfe der gemessenen oder der von der ATU-TRX-Com übermittelten TRX-Frequenz ein. Die Einstellung kann mit der automatischen Abstimmung auf bestes SWR korrigiert und im EEPROM gespeichert werden.
- "Man": Der ATU stellt die Abstimmdaten (L, C und Hoch-/Tiefpass) aus dem EEPROM mit Hilfe der gemessenen oder der von der ATU-TRX-Com übermittelten TRX-Frequenz ein. Die Einstellung kann manuell auf bestes SWR korrigiert und im EEPROM gespeichert werden.
Bevorzugte Betriebsart in der SWL-Option. - "Setup": Einstellen wichtiger, im EEPROM gespeicherter Betriebsparameter.
- "Calibrate": Kalibrieren der Log Amps an zwei Stützstellen.
- "Auto Tune Setup": Vorgabedaten zur Beschleunigung der automatischen Abstimmung.
In den Betriebsarten "Auto" und "Man" werden in der Display-Zeile 1 die Einstelldaten für L, C und Hoch-/Tiefpass angezeigt. Die Werte für L und C werden aus den im EEPROM gespeicherten Daten für die Nullinduktivität/Nullkapazität, den Schrittweiten für L und C und der jeweiligen Encodereinstellung berechnet.
L und C werden über Relais binär entsprechend den Encoderwerten 0 bis 255 geschaltet, so dass Werte bis ca. 33 μH (im Mustergerät mit 8 Spulen) und 815 pF eingestellt werden können. In der "Christian-Tuner"-Einstellung mit 7 Spulen zählt der Encoder nur von 0 bis 127.
Es sind alle Amateurbänder von 160 bis 6 m programmiert. Die insgesamt 144 Bandsegmente teilen sich wie folgt auf:
| Band | von (kHz) | bis (kHz) | Segmente | Breite (kHz) |
|---|---|---|---|---|
| 160m | 1.800 | 2.000 | 20 | 10 |
| 80m | 3.500 | 3.800 | 30 | 10 |
| 60m | 5.280 | 5.420 | 8 | 20 |
| 40m | 7.000 | 7.200 | 10 | 20 |
| 30m | 10.100 | 10.160 | 3 | 20 |
| 20m | 14.000 | 14.360 | 12 | 30 |
| 17m | 18.068 | 18.188 | 4 | 30 |
| 15m | 21.000 | 21.480 | 12 | 40 |
| 12m | 24.890 | 24.990 | 2 | 50 |
| 10m | 28.000 | 29.740 | 29 | 60 |
| 6m | 50.030 | 51.010 | 14 | 70 |
Wird ein passendes Bandsegment nicht gefunden oder liegt die TRX-Frequenz nicht an, wird statt der Band-Mittenfrequenz "NoBand" angezeigt.
Beispielhaft sei hier das Display für den Automatic-Mode gezeigt. Details in der Bedienungsanleitung.

Abb. 4.1: Display "A", Automatic Mode.
Die automatische Einstellung wird mit Hilfe der aktuellen TRX-Frequenz und den im EEPROM gespeicherten Daten vorgenommen. Die TX-Frequenz ermittelt der Frequenzzähler aus dem Signal der SWR-Messeinheit, wahlweise stellt das ATU-TRX Com-Modul die RX-Frequenz bereit. Zur TRX-Frequenz wird das passende Bandsegment gesucht und daraus die EEPROM-Adresse ermittelt, unter der die Daten gespeichert sind. Diese Daten (L, C, H/L) werden automatisch eingestellt.
Die vorlaufende Leistung wird in Zeile 3 im Automatic-Mode wahlweise als PEP ("FWP") oder als Average Power ("FWA"), beide in Watt, angezeigt. Umschaltung mit der Reset-Taste. Rücklaufende Leistung und SWR sind gemittelte Werte. Die PEP-Messung über das Abtasten der modulierten HF-Spitzenspannungen mit dem ADC ist infolge dessen begrenzter Abtastrate nur bedingt genau.
4.3 Die automatische Abstimmung
Mit der Entwicklung des Softwareteils für die automatische Abstimmung wurde mein Nervenkostüm doch arg strapaziert. Es ging sowohl um die Suchstrategie an sich, eigentlich waren es im Verlauf mehrere, wie auch um deren praktische Umsetzung. Nach einigen Versuchen am AVR bin ich schließlich auf Excel VBA (Visual Basic for Applications) ausgewichen, um die Irrungen und Wirrungen des Suchprogramms zu ergründen. Hierzu wurden ca. 3.000 Messpunkte mit dem ATU aufgenommen und in Excel übertragen. Einige Abbildungen in der Bedienungsanleitung rühren daher.
Es hat sich gezeigt, dass ein unbedarftes Suchen nach einem minimalen SWR mit Hilfe der Variation der Kapazitäten und Induktivitäten über deren gesamten Einstellungsbereich in nervenschonender Zeit nicht zum Ziel führt. Zu unterschiedlich ist das Resonanzverhalten des hiesigen 2x13,75m-Dipols mit Hühnerleiter. Deshalb wurde speziell für die Abstimmautomatik ein eigenes Setup eingeführt, in dem je Amateurband eigene Suchparameter voreingestellt werden können. Im 15m-Band etwa, dem der Dipol annähernd eine 2λ-Resonanz anbietet, ist der Einstellbereich für L und C extrem schmal - keine Chance für den ATU, mit Standardeinstellungen wie etwa für das 80m-Band, diesen Resonanzpeak in akzeptabler Zeit zu finden.
Setup und Suchstrategie sind in der Bedienungsanleitung näher beschrieben.
Mit entsprechenden Vorbesetzungen der Abstimmbereiche und anfänglichen Schrittweiten für L und C und der Startkonfiguration Hoch- oder Tiefpass wurde eine Abstimmzeit von 2 bis 3 Sekunden in den untersuchten Bändern 80 bis 10m erreicht, wenn für eine Frequenz erstmalig angepasst wird. Eine Nachoptimierung ist deutlich schneller.
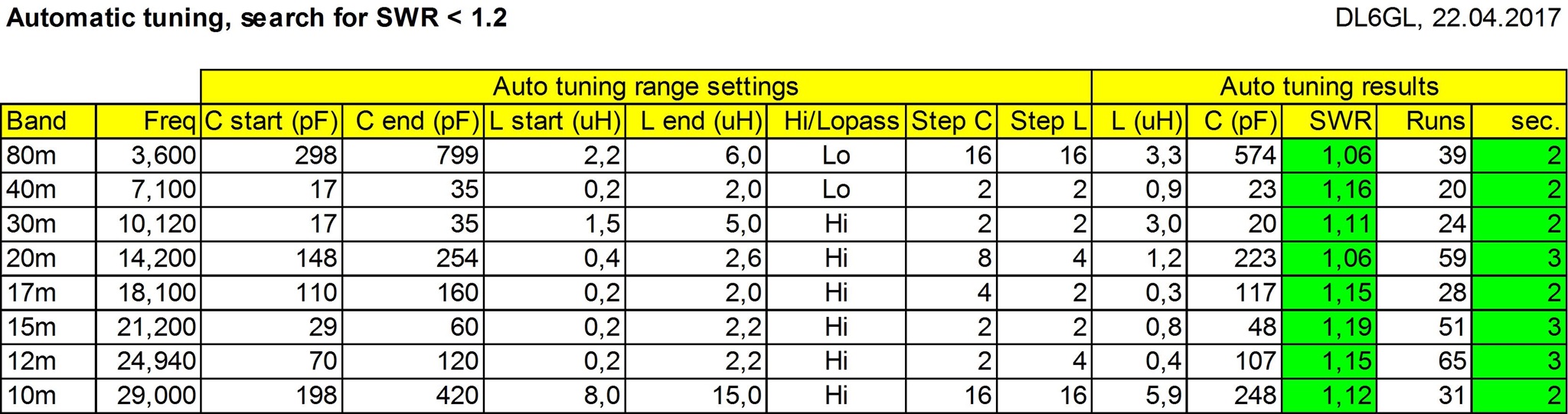
Abb. 4.2: Voreinstellungen und Ergebnisse der automatischen Abstimmung.
Der "Intelligenz" des Controllers wollte ich mich nun doch nicht restlos ausliefern: Die automatische Abstimmung rennt nicht von alleine los, wenn sie meint, sie müsste mal wieder am Rad drehen. Sie muss immer noch mit Betätigung des Tune-Tasters angestoßen werden, wenn der Operateur meint, das SWR verbessern zu wollen.
4.4 Die Software
Die Software für die beiden ATMega ist in BASCOM AVR geschrieben. Der Code ist umfangreich dokumentiert. Der Quellcode ist Open Source für den privaten Gebrauch. Eine kommerzielle Nutzung ist nicht gestattet.
Die Software (.bas und .hex) steht einschließlich einer Excel-Mappe mit Layoutunterlagen im Download zur Verfügung. Die Daten für die EEPROM-Voreinstellungen in "ATU_Contoller_EEPROM_Data_300.bas" müssen, falls neu kompiliert wird, im gleichen Verzeichnis wie die Quelle "ATU_CONTROLLER_xxx.BAS" gespeichert sein.
Die Programmierung erfolgt über den ISP-Stecker in der Schaltung.
Das Controllerprogramm in der Version 3.00 wurde aufgrund der Erweiterungen umgepflügt und wieder fein geharkt. Wie für jede Software gilt auch hier: Es sind bestimmt noch Fehler drin. Für Hinweise bin ich dankbar.
Gerd, DC6HL, hat mich im September 2018 auf ein Problem in der Kommunikation mit der Remote Unit hingewiesen. An der Fehlersuche habe ich mich eine ganze Weile abgearbeitet, dennoch danke für den Hinweis. Die Inbetriebnahme des QRO Christian-Tuners von Aart, DL6DU, deckte weitere Verbesserungspotenziale auf, die wir in einem regen Austausch im Nov./Dez. 2018 zusammen umsetzen konnten. Danke, Aart. Die Updates sind im Download eingestellt. Weitere werden womöglich infolge Anwenderhinweisen folgen. Der Entwickler selber eignet sich nun mal eher weniger als Tester.
Mit der Version 3.14 der Controller-Firmware wurde von BASCOM-AVR 2.0.7.6 auf BASCOM-AVR 2.0.8.2 umgestellt, was sich zu einem Abenteuer der besonderen Art entwickelte. Neben einem (bisher) entdeckten und von MCS bestätigten Bug musste der neue Compiler mit einem aus meiner möglicherweise beschränkten Sicht sinnfreien Dummy-Byte vor dem Erklärungsabschnitt dazu gebracht werden, das RAM ordentlich zu strukturieren. So zumindest habe ich den Hinweis von MCS speziell für "große" Controller verstanden. Das war nur in der Firmware des ATmega1284P-Controllers notwendig. Ein "kleiner" ATmega16, auf dem ich in meiner Ratlosigkeit vor dem Hinweis von MCS eine abgespeckte Version geladen habe, kam ohne dieses Dummy-Byte zurecht. Der Compiler V2.0.7.6 brauchte dieses Byte ohnehin nicht. Der Laie wundert sich und kommt nicht umhin, auch das als Bug anzusehen. Dennoch, danke an den Support von MCS. Auf die Idee mit dem Dummy-Byte wäre ich nie gekommen.
| « 3 ATU-TRX-Kommunikation | TOP | » 5 Aufbau |