1 Steuergerät
Erstellt: DL6GL, 05.05.2017, letzte Änderung 18.08.2025
| « Automatischer symm. Antennentuner-ATU 2017 | TOP | » 2 Remote Unit |
Das Steuergerät enthält den Richtkoppler für SWR und Power, den Controller und ein Netzteil, das auch die 24V-Spannung zur Schaltung der Relais im Tuner bereitstellt.
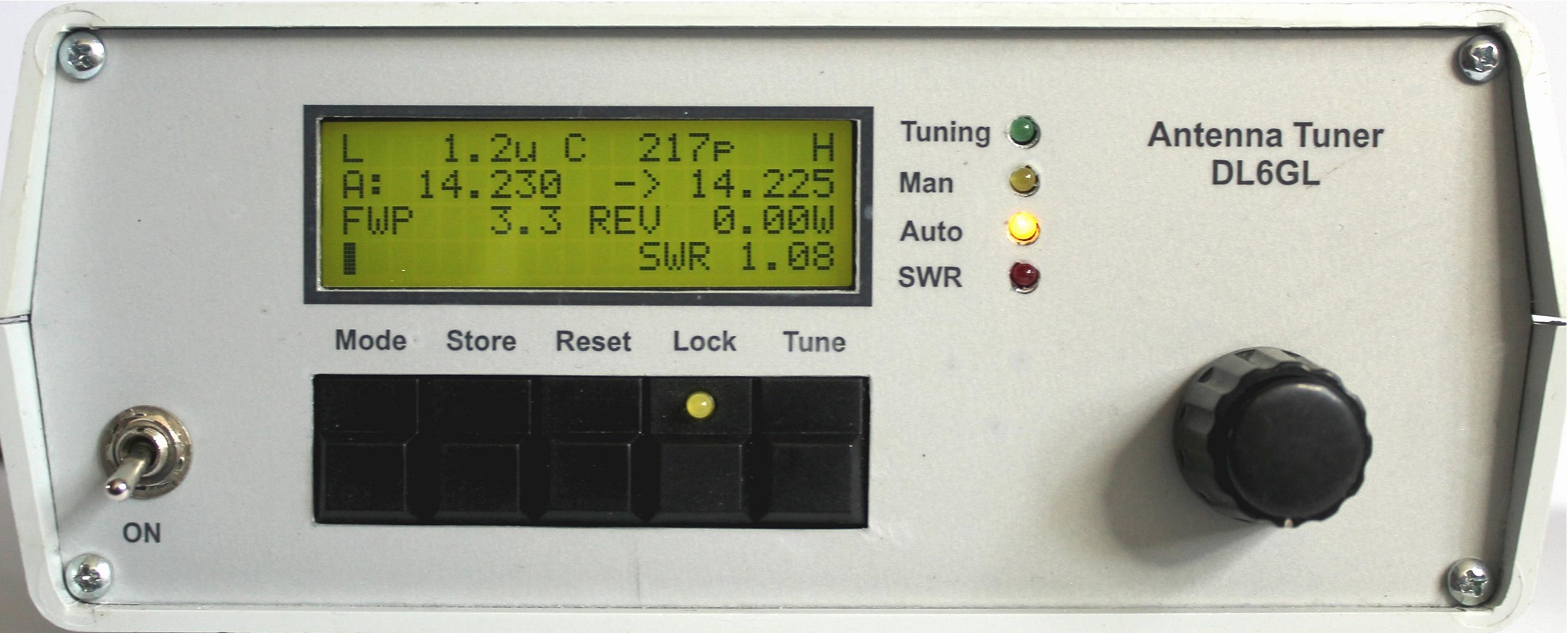
Abb. 1.1: Frontplatte des Steuergerätes.
1.1 Netzteil (unverändert, Rev. 2, Aug. 2013)
Im Netzteil (Versorgung des Controllers und der Remote Unit) wird ein 78S15 (2A) verwendet. Mit der Zener-Diode, hier 7,5 V, kann die Spannung für die 24V-Relais in der Remote Unit etwas verkleinert werden, um den Stromverbrauch zu reduzieren. Die verwendeten 24V-FINDER-Relais sprechen schon bei ca. 20 V an. Spannungsabfall auf der Steuerleitung bei Ansteuerung aller Relais beachten! Auf der Platine sind für die Zenerdiode D1 Lötpads für zwei Dioden vorgesehen. 24V-Relais wurden gewählt, um den Spannungsabfall auf der Steuerleitung zwischen Controller (im Shack, vielleicht im Keller) und der Remote Unit (am Ende der Hühnerleiter, vielleicht auf dem Dach) in Grenzen zu halten. Idee war, die Remote Unit an ihrem jeweiligen Standort netzunabhängig zu machen, also die Versorgungsspannung über die Steuerleitung mitzuliefern.
Wenn keine größeren Entfernungen zu überbrücken sind oder der Remote Unit ein eigenes Netzteil spendiert wird, können im Rahmen der Belastbarkeit der die Relais schaltenden ULN2803 (max. 50V/500mA) beliebige Relais in der Remote Unit eingesetzt werden, z.B. 12V-Typen. Erfolgt die Spannungsversorgung dennoch über die Steuerleitung, könnten die nun höheren Schaltströme ggf. induktiv auf die RS485-Leitungen rückwirken und die Kommunikation stören. Der Spannungsabfall spielt ebenfalls eine größere Rolle. In der ersten Version des ATU mit 24V-Relais und ca. 15m CAT-Kabel gab es solche Probleme nicht.
Das Netzteil einschl. Trafo ist bei Verwendung anderer als der 24V-Relais entsprechend anzupassen.
Der Controller alleine benötigt etwa
- 12V/80mA (mit LEDs und PTT-Relais)
- 5V/180mA mit LCD EA DIP204-4 mit LED-Vorwiderständen wie angegeben
- 5V/230mA mit LCD EA DIP203-4 (200mA mit LED-Vorwiderständen wie angegeben)

Abb. 1.2: Schaltbild des Steuergeräte-Netzteils.
18.08.2025: Dennis, DB2OE, hat mich auf einen Fehler im Bestückungsplan in "atu_power_supply_pcb_2013-02.zip" hingewiesen. Dort ist D2 auf der Platine zwischen Ein- und Ausgang des auf der Gehäuserückseite mit Glimmerscheibe montierten 78S15 falsch herum gepolt eingezeichnet . Korrigierte Version im Download.
Asche auf mein Haupt! Danke Dennis.
Noch ein Hinweis zu D1 in Abb. 1.2: Im o.g. Bestückungsplan sind hier 2 Dioden eingezeichnet. Die Si-Diode in Durchlassrichtung nach Masse ist dazu gedacht, den mittleren Masseanschluss des 78S15 um weitere 0,7V als Ergänzung zur Zenerdiode D1 (in Sperrrichtung) hochzulegen. Im Mustergerät wurde eine vorhandene 6,8V-Zenerdiode mit der Si-Diode zu 7,5V kombiniert, um eine Ausgangsspannung von 22,5V statt der Relais-Nominalspannung 24V einzustellen.
Die Zusatzbelastung durch das ICOM-Kommunikationsmodul (Abschnitt 3.2) mit 100/200 mA ohne/mit Debug-LCD wurde bei der Auslegung des Netzteils nicht berücksichtigt. Im hier vorgestellten Mustergerät wird es nicht eingesetzt.
1.2 Controller

Abb. 1.3: Schaltbild des Controllers Rev. 3.
Am AVR-Pin PB1 (T1) ist der Frequenzzähler angeschlossen. Er besteht aus einem Vorverstärker (T1), einem Schmitt-Trigger (IC3) und einem 1/8-Teiler (IC2). Bei 18.432 MHz Taktfrequenz ist damit im 6m-Band noch sicher zu zählen. Die Eingangsempfindlichkeit beträgt etwa 40 mVss. Falls die HF-Spannung nicht reichen sollte, können C16 und R27 im SWR-Koppler (Abb. 1.7) erhöht werden. Die Frequenzkalibrierung wird mit C10 vorgenommen. Der Frequenzzähler ermittelt die aktuelle TX-Frequenz zur Einstellung der passenden Tunerdaten.
Zur RS485-Kommunikation mit IC5 sind hier und hier auf dieser Website ausführliche Beschreibungen zu finden. Im Mustergerät wurden R18 und R20 an den Signalleitungen A und B mit jeweils 750R dimensioniert (Fail safe). Bei sehr langem Bus können ggf. etwas geringere Werte vorteilhaft sein, bei sehr kurzem Bus könnten sie auch entfallen - ausprobieren. Der Abschlusswiderstand R19 sorgt für eine Impedanzanpassung gängiger Twisted Pair-Leitungen. Diese müssen jeweils an den Bus-Enden angebracht werden. Eine Überprüfung der Signale bei Schaltvorgängen auf (halbwegs) Rechteckform mit dem Scope wäre sinnvoll.
Etwas mäkelig verhalten sich einige MAX485SCA (SO8). Bisweilen ist hier der optionale C11 (1nF) erforderlich, um die Kommunikation überhaupt möglich zu machen, manchmal geht es auch ohne. Testschaltungen, die ohne C11 auskamen, funktionierten auch mit, also vielleicht gleich bestücken. Der MAX485CPA im DIP8-Gehäuse, zumindest der in der Remote Unit eingesetzte mit MAXIM-Logo, verhält sich dagegen ohne dieses ominöse C handzahm.
Nachdem einige OMs von Schwierigkeiten mit dem MAX485 berichteten, auch wegen eigener Erfahrungen aus den Anfängen der Entwicklung, steht eine Platinenversion des Controllers mit einem MAX485 in DIP8-Bauform im Download zur Verfügung. Gesockelt könnte man den Chip wenigstens mal austauschen.
Derzeit sind nur die beiden ADC-Eingänge ADC0 und ADC1 aktiviert. Hier werden die Kopplersignale FWD (Vorwärtsleistung) und REV (reflektierte Leistung) ausgewertet. Die Anschlüsse PA2 (ADC2) und PA3 (ADC3) werden aktuell nicht benutzt.
Die Beschaltung VCC an den Pins 5, 17 und 38 ist vielleicht noch erklärungsbedürftig. Der ATmega wird an Pin 5 mit +5V (VCC) versorgt. An den Pins 17 und 38 ist ebenfalls VCC herausgeführt, um dort Stützkondensatoren (C4 und C5) anzuordnen. Diese puffern VCC bei den digitalen Schaltvorgängen im Chip.
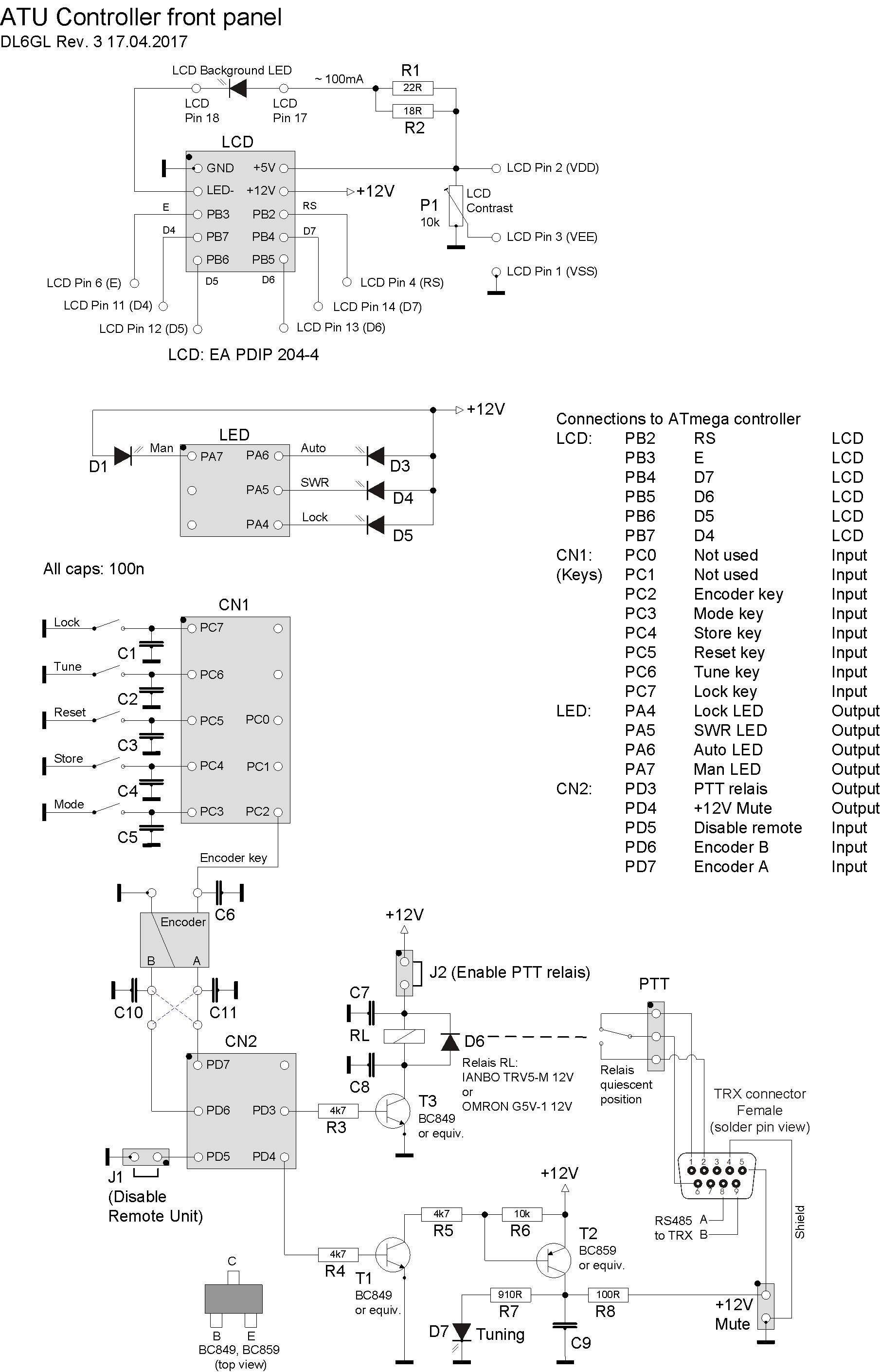
Abb. 1.4: Schaltbild des Controller-Frontpanels Rev. 3.
Für das hier verwendete, inzwischen abgekündigte 5V-LCD EA DIP204-4 gibt es im Download eine Adapterplatine für den 3,3V-Nachfolger EA DIP203-4. Da der RW-Port des LCD auf Masse liegt, d.h. nur Schreibbefehle vom Controller ans LCD geschickt werden, besorgen ein 3,3V-Spannungsregler und ein nicht invertierender Hex-Buffer 74HC4050 den Levelshift von 5V nach 3,3V auf den Steuer- und Datenleitungen.
Die Platine hat Dirk, DH4YM, ab sofort (Apr 2018) im Programm. Dirk liefert sogar kostenfrei die neue Adapterplatine an Altbesteller auf Anfrage nach. Das nenne ich Ham spirit!
Die Controller-Firmware, V3.00 und höher, funktioniert sowohl mit dem alten EA DIP204-4 als auch mit dem neuen EA DIP203-4, jeweils mit der passenden Adapterplatine.
Das Frontpanel trägt alle Bedien- und Anzeigekomponenten. Es ist mit Flachkabeln und doppelreihigen 6- bzw. 10-poligen Steckkontakten mit dem Controller verbunden.
Für OMs, die nicht einsehen, Mondpreise für das Display EA DIP203-4 von Electronic Assembly hinzublättern, gibt es seit Apr. 2019 ab der Version V3.12 auch eine Variante für HD44780-kompatible 20x4-LCD. Die Steckverbindungen auf dem Frontpanel passen dafür allerdings nicht. Die Version "HD44780" wurde nur auf einem Testboard mit einem gerade vorhandenen 20x4-LCD probiert.
Zur Reduzierung der TX-Leistung (TX mute) stehen zwei Ausgänge zur Verfügung, die vor jeder Relais-Umschaltung in der Remote Unit gleichzeitig geschaltet werden: Ein PTT-Relais mit Umschaltkontakten und ein +12V-Steuerausgang ("Mute"). Die LED D7 "Tuning" zeigt diesen Schaltzustand an.
Der Mute-Ausgang ist dazu gedacht, die TX-Leistung auf wenige Watt zu reduzieren, um die schaltenden Relais in der Remote Unit zu schonen, sofern der TX gerade aktiv ist.
Das PTT-Relais wird nur bei gestecktem Jumper J2 aktiviert. Damit kann ergänzend der TX im CW Dauerstrichmodus mit über "Mute" reduzierter Leistung für die automatische Abstimmung eingeschaltet werden. 1W reicht aus, um das SWR bzw. den Return Loss zur Optimierung messen zu können.
Mute und PTT werden wieder zurückgesetzt, wenn die Schaltvorgänge in der Remote Unit beendet sind, bei einer manuellen oder mit Ende der automatischen Abstimmung.
Die LED D4, am Vorgänger zur Anzeige der Programmierfunktion, zeigt nun blinkend ein SWR>3 an. Sonst keine Änderung gegenüber der Version 2013.
Die Anpassung der Bauhöhen der Taster und des in zwei neunfach Stecksockel (Rastermaß 2,0 mm) eingesteckten Displays an die Durchbrüche in der Frontplatte besorgt eine separate Display-Platine. Hierfür ist auf der Frontpanel-Platine ein Ausbruch auszusägen.
1.3 Die Platinen
Die Abmessungen und Befestigungslöcher der Controllerplatine sind kompatibel zur Vorgängerplatine.
Die von DH4YM lieferbaren Platinen in Industriequalität sehen um einiges schöner aus.
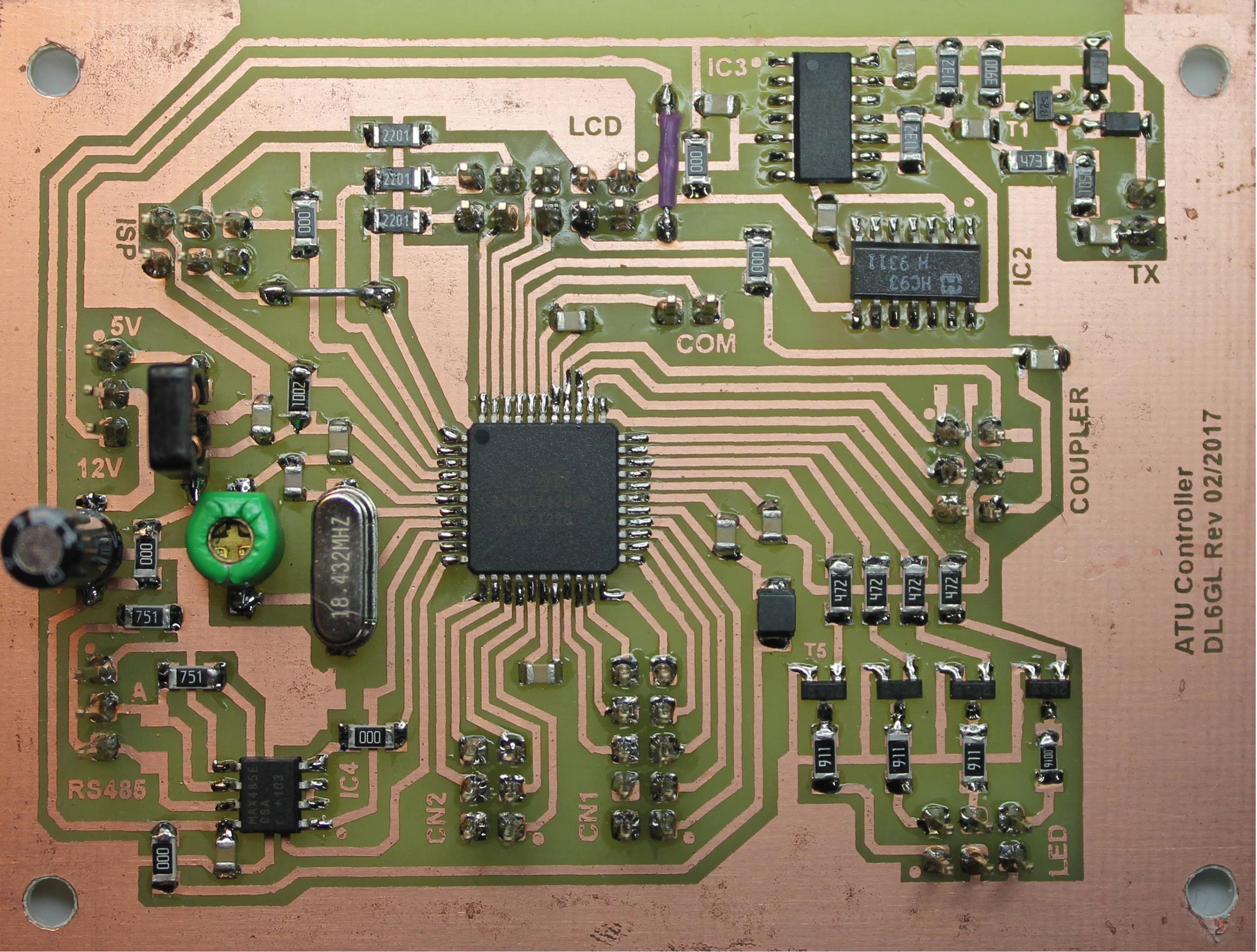
Abb. 1.5: Platine des Controllers.
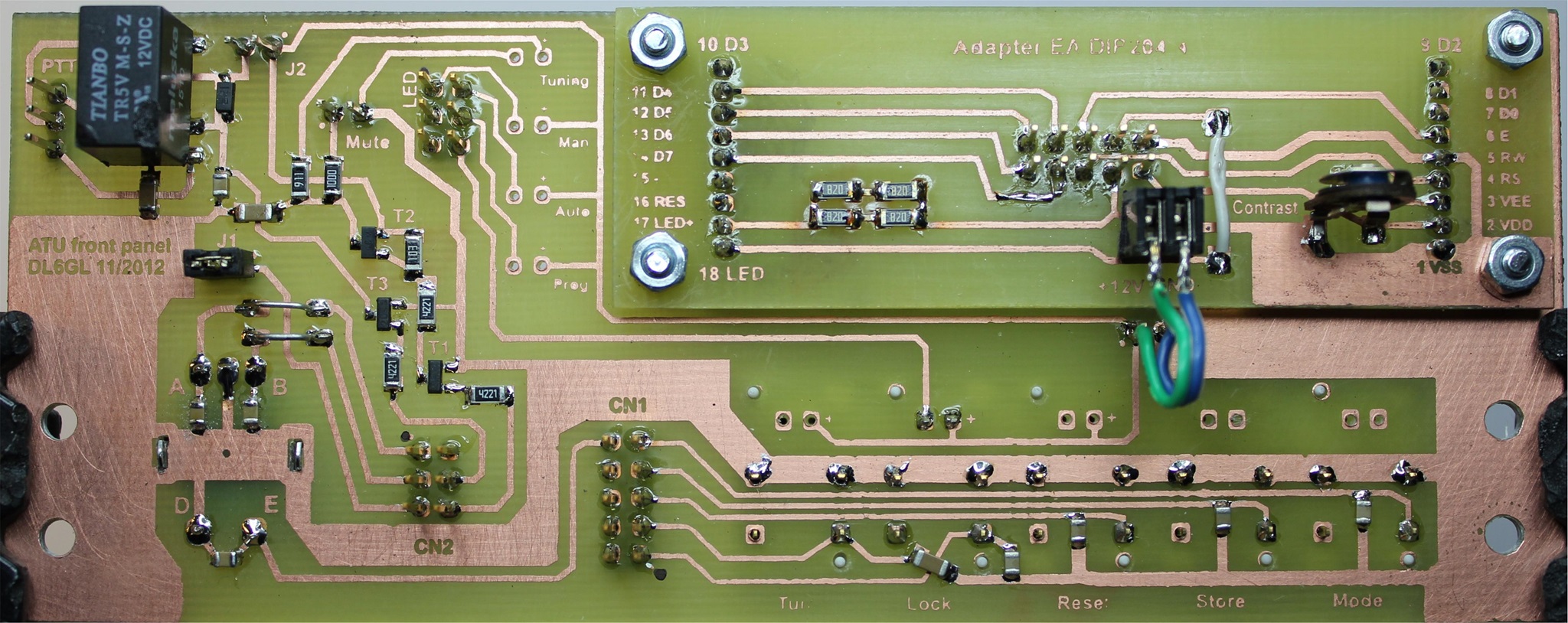
Abb. 1.6: Platine des Controller-Frontpanels (Rev.2, 2013 unverändert mit EA DIP204-4-Adapter).

Abb. 1.6a: Display-Adapter für EA DIP203-4 (neu 04/2018).
1.4 SWR-Koppler
Das hier auf dieser Website beschriebene SWR-/Powermeter, wie auch im Vorgänger mit Dioden aus einer Vorstudie für den ATU entstanden, ist nun Bestandteil des ATU. Die eingesetzten AD8307 ermöglichen eine zuverlässigere SWR-Messung auch bei geringen TX-Leistungen gerade bei der Antennenabstimmung.
In Anbetracht des z.B. bei SV1AFN aufgerufenen fairen Preises von etwas mehr als 1 EURO für einen Log Amp AD8307 (Apothekenpreise im Fachhandel 10 bis 15 EURO) gibt es keinen vernünftigen Grund mehr, sich mit Diodengleichrichtern abzuquälen.
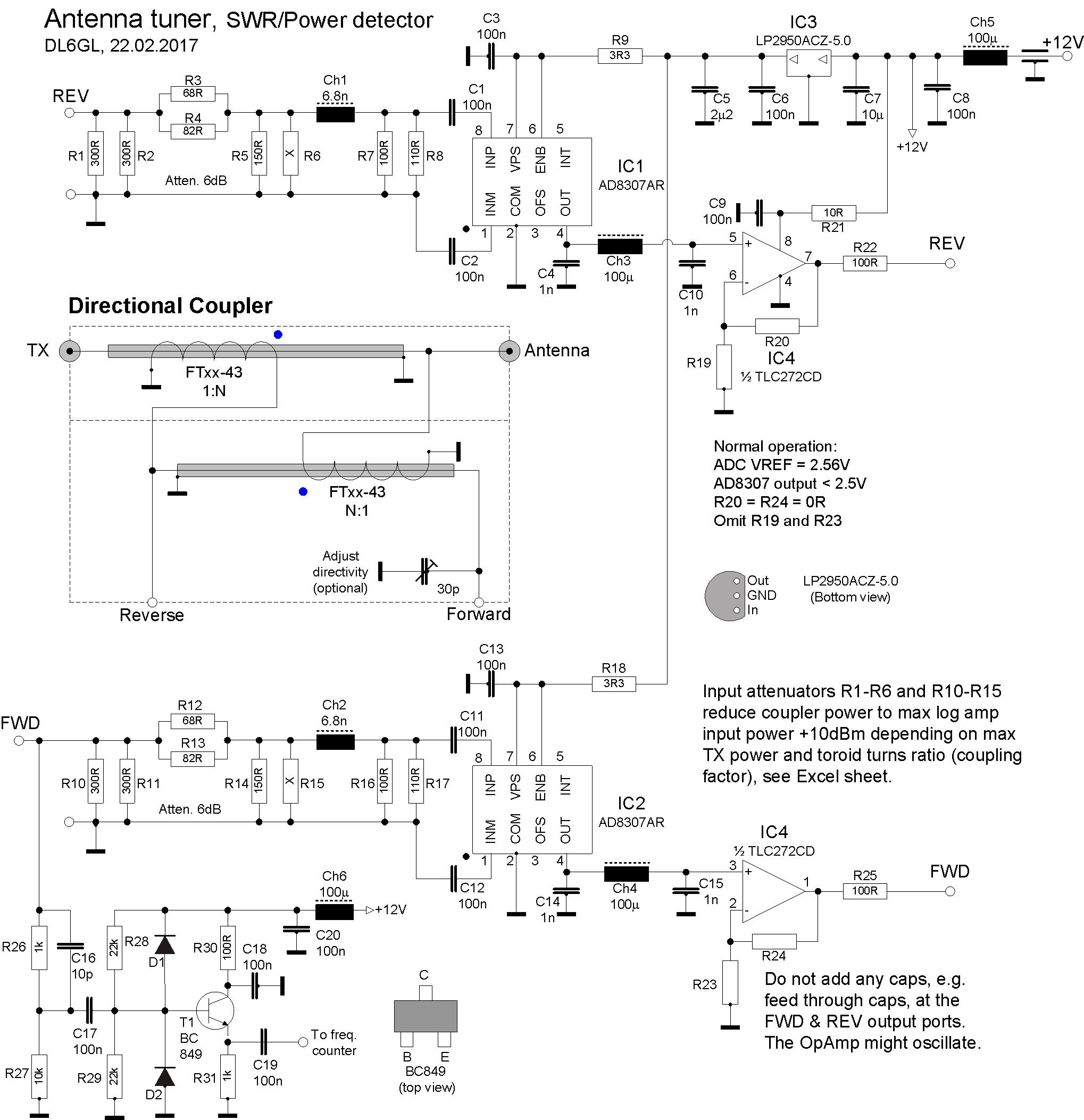
Abb. 1.7: Schaltbild des Kopplers.
Eigentlich keiner Erwähnung wert - es kamen dennoch Anfragen dazu - der gezeigte "Directional Coupler" ist für UHF nicht geeignet. Näheres zu Messungen an Richtkopplern ist hier aus einem früheren Artikel zu finden. Siehe aber auch hier (neuerer Artikel).
Die Pi-Abschwächer R1 bis R6 sowie R10 bis R15 bilden zusammen mit den Anpassgliedern Ch1/Ch2 und R7/R8 bzw. R16/R17 zu den AD8307 die reellen 50Ω-Lasten an den Forward- und Reverse-Ports des Richtkopplers. Die Abschwächer, hier 6dB, sind wie die Ringkerne im Koppler der jeweiligen maximalen TX-Leistung anzupassen. Abhängig vom Kopplungsfaktor der verwendeten Ringkerne kann die Belastbarkeit der 0805-Widerstände in den Abschwächern vor den Log Amps überschritten werden. In solchen Fällen müssen Leistungsabschwächer vorgeschaltet werden. Details zur Berechnung hier. Mit dem Excel-Sheet können für die vorgesehene maximale TX-Leistung die passenden Ringkerne, Kopplungsfaktoren (=Windungszahlen) und die Dimensionierung der Abschwächer vor den Log-Amps durch Variation der Parameter herausgefunden werden:
- Die Windungszahl N bestimmt die ausgekoppelte HF-Leistung. Der Kopplungsfaktor CF = 20*LOG(N) ist der ausgekoppelte Anteil, genauer das logarithmische Verhältnis der primären zur ausgekoppelten Leistung in dB, d.h. ein hoher CF (hohe Windungszahl) koppelt wenig HF aus. Für den Kurzwellenbereich sollte N~30 das Maximum sein.
- Die Windungszahl bestimmt wiederum die über den Stromtransformator in die Antennenleitung hinein transformierte Leitungsimpedanz Z = R /N^2, R= Systemimpedanz 50Ω, d.h. eine höhere Windungszahl bewirkt eine geringere Einfügedämpfung des Kopplers.
- Eine höhere Windungszahl ergibt eine niedrigere magnetische Flussdichte im Spannungstransformator bei vorgegebener TX-Leistung. Zusammen mit der zu verwendenden Ringkerngröße ist die vom Spannungstransformator zu verkraftende magnetische Flussdichte, abhängig von dem maximal auftretenden VSWR, zu begrenzen. Platz sparend wäre ein Stocken mehrerer Ringkerne im Spannungstransformator falls nötig. Damit verteilt sich der magnetische Fluss auf einen entsprechend größeren Ringkernquerschnitt.
Bei hohen Leistungen und hohem VSWR liegen am Spannungstransformator Spitzenspannungen von einigen 100V. Hier wäre die Wicklung mit PTFE-Isolierung statt CuL ins Auge zu fassen. Fingerfertige könnten sich mit Sanitär-Teflonband behelfen. Bei Drahtstärken ab 0,5mm lässt sich das mit Zug schräg um den Draht wickeln. Das Einfädeln in kleinere Ringkerne ist allerdings eine Herausforderung. - Der Kopplungsfaktor bestimmt die Größe der Abschwächer vor den Log Amps und damit die Belastung der verwendeten Widerstände. Ein hoher Kopplungsfaktor macht eine geringere Abschwächung notwendig, in der Folge geringere Anforderungen an die Belastbarkeit der im Log Amp-Modul verwendeten SMD-Widerstände der Größe 0805, insbes. R1, R2 und R10, R11 in Abb. 1.7.
IC4 sorgt für eine niederohmige Einspeisung in die ADC des Controllers. Mit der im Controller konfigurierten internen ADC-Referenz 2,56V und der maximalen Ausgangsspannung des AD8307 von 2,5V ist eine Spannungsfolgerschaltung von IC4 mit R20/R24 = 0Ω, ohne R19 und R23 ausreichend. Fallweise kann mit den Gegenkopplungswiderständen die Spannungsverstärkung > 1,
V = 1 + R20/R19 = 1 + R24/R23,
ausgelegt werden. Die Ausgänge von IC4 vertragen keine kapazitiven Lasten, etwa von Durchführungskondensatoren in der Gehäusewand. Bei Schwingneigung von IC4 R22/R25 auf 1k erhöhen, können auch gleich bedenkenlos auf 1kΩ gesetzt werden (ist in der korrigierten Schaltung im Download so erfolgt).
Die Siebglieder zwischen den AD8307-Ausgängen und den OpAmp-Eingängen, etwa C14/Ch4/C15 im FWD-Kanal, sind bewusst hochfrequent ausgelegt, um eine PEP-Messung mit dem ADC des AVR durch Abtasten der maximalen Amplitude möglich zu machen.
Im Vorlaufzweig ist ein Emitterfolger T1 eingefügt, an dem die HF für die Frequenzmessung entnommen wird.
Zu beachten sind die verschiedenen Bohrungen in den Massebahnen. Sie sind für Durchkontakierungen zur Massefläche auf der Rückseite gedacht.
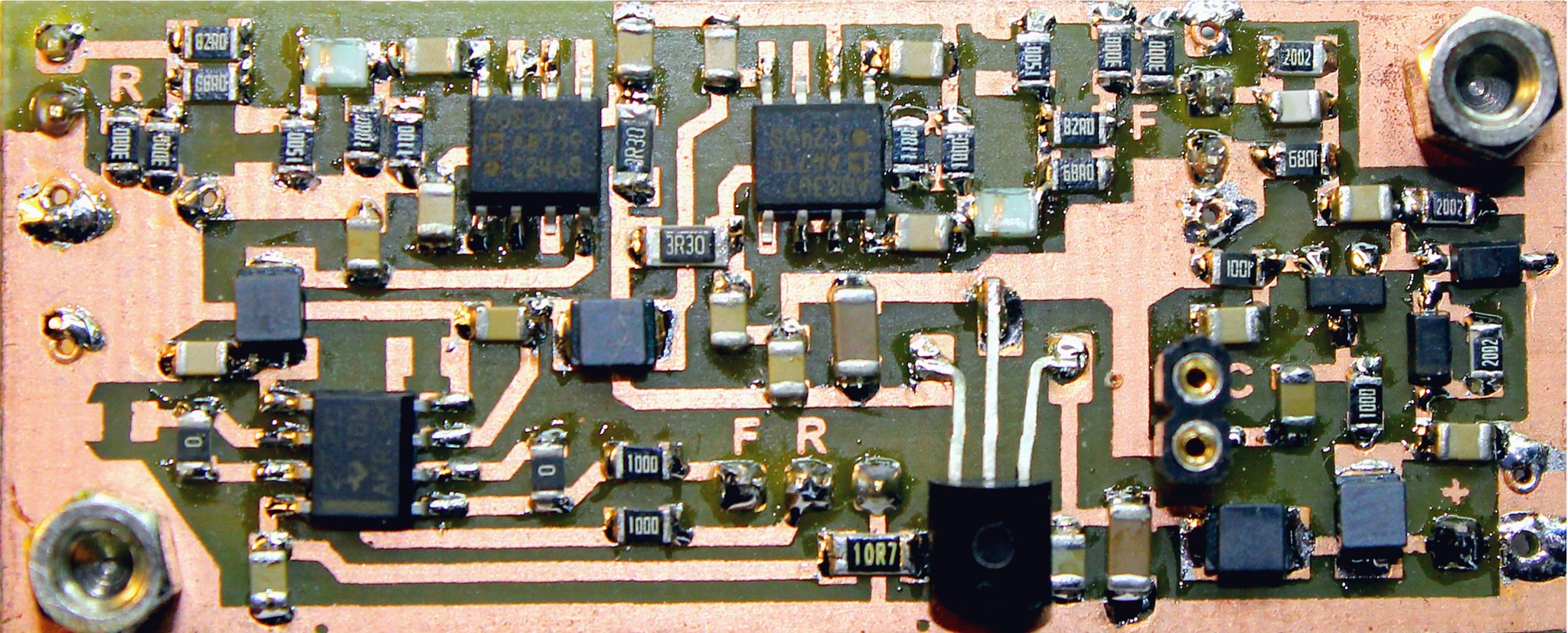
Abb. 1.8: Kopplerplatine.
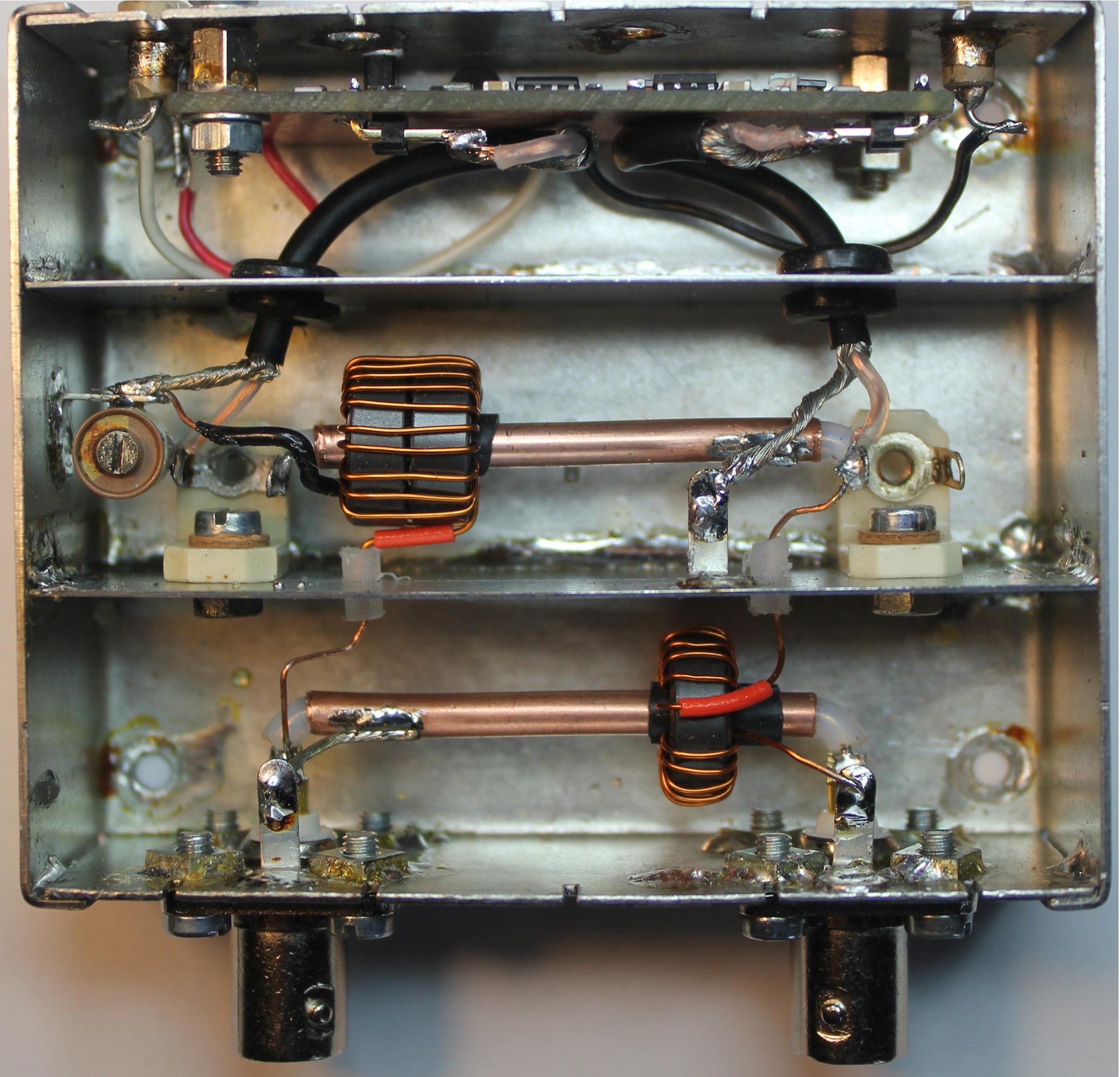
Abb. 1.9: 20W-Koppler.
Bei der Montage der Ringkerne ist auf richtige Polung zu achten (Punkte in Abb. 1.7 = rote Markierungen in Abb. 1.9). Die Kerne mit identischem Wickelsinn sind um 180° gegeneinander gedreht angeordnet. Das Zusammenschalten der Ringkerne ist im Download beschrieben. Mit dem 30p-Trimmer (Abb. 1.9, Mitte links) lässt sich bei Abschluss mit 50Ω eine minimale DC-Spannung am REV-Ausgang für eine maximale Richtschärfe z.B. bei 14MHz einstellen.
Ergänzung Okt. 2019: Wer vorab die Funktion des Kopplers ohne das Steuergerät überprüfen will, kann dies mit Hilfe eines kleinen Excel-Sheets im Download machen. Gebraucht werden dazu ein HF-Generator, ggf. TRX, Abschwächer und ein Digitalvoltmeter. Mit Hilfe des HF-Generators und des Abschwächers werden zwei genau bekannnte Leistungen sowohl an den FWD- und den REV-Eingang der Kopplerplatine gegeben. Mit den gemessenen DC-Spannungen FWD und REV für die hohe bzw. niedrige HF-Leistung erfolgt die Zweipunktkalibrierung der beiden AD8307. Nach Verschaltung mit dem Koppler, 50Ω-Dummy am Ausgang und TX am Eingang, kann nun die gemessene TX-Leistung mit der aus den Kalibrierung berechneten Leistung verglichen werden. Das berechnete VSWR sollte bei 1,0x liegen. Einem OM, der seinem Kopplernachbau nicht traute, konnte damit geholfen werden. Er, der Koppler, war kerngesund.
Ergänzung Okt. 2021: An einem Nachbau von Rainer, DC6LB, wurden Linearität und Gleichlauf der zwei AD8307 eingehender untersucht:
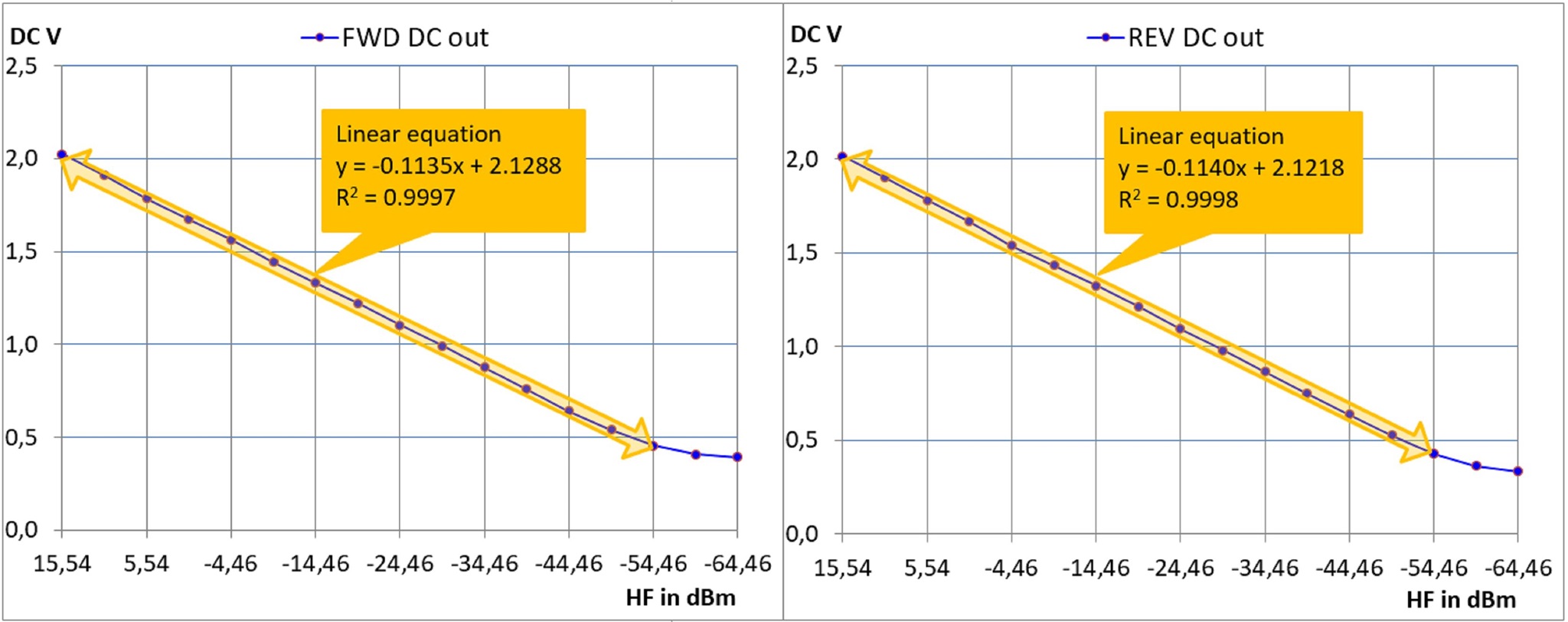
Abb. 1.9a: Kennlinien der AD8307 im Koppler von DC6LB.
Der untersuchte Eingangsleistungsbereich -64,46 bis +15,54dBm bei 10MHz entspricht mit den verbauten 13,98dB On Board-Abschwächern einem Eingangsleistungsbereich der AD8307 von -78,44 bis +1,56dBm. Das Abflachen der Kennlinien am unteren Ende ist deutlich zu erkennen. Ohne diese zwei letzten Messpunkte ist der farblich gekennzeichne Kennlinienbereich hervorragend linear mit einer Anpassungsgüte R^2 von fast 1. Zudem sind beide Kennlinien nahezu identisch.
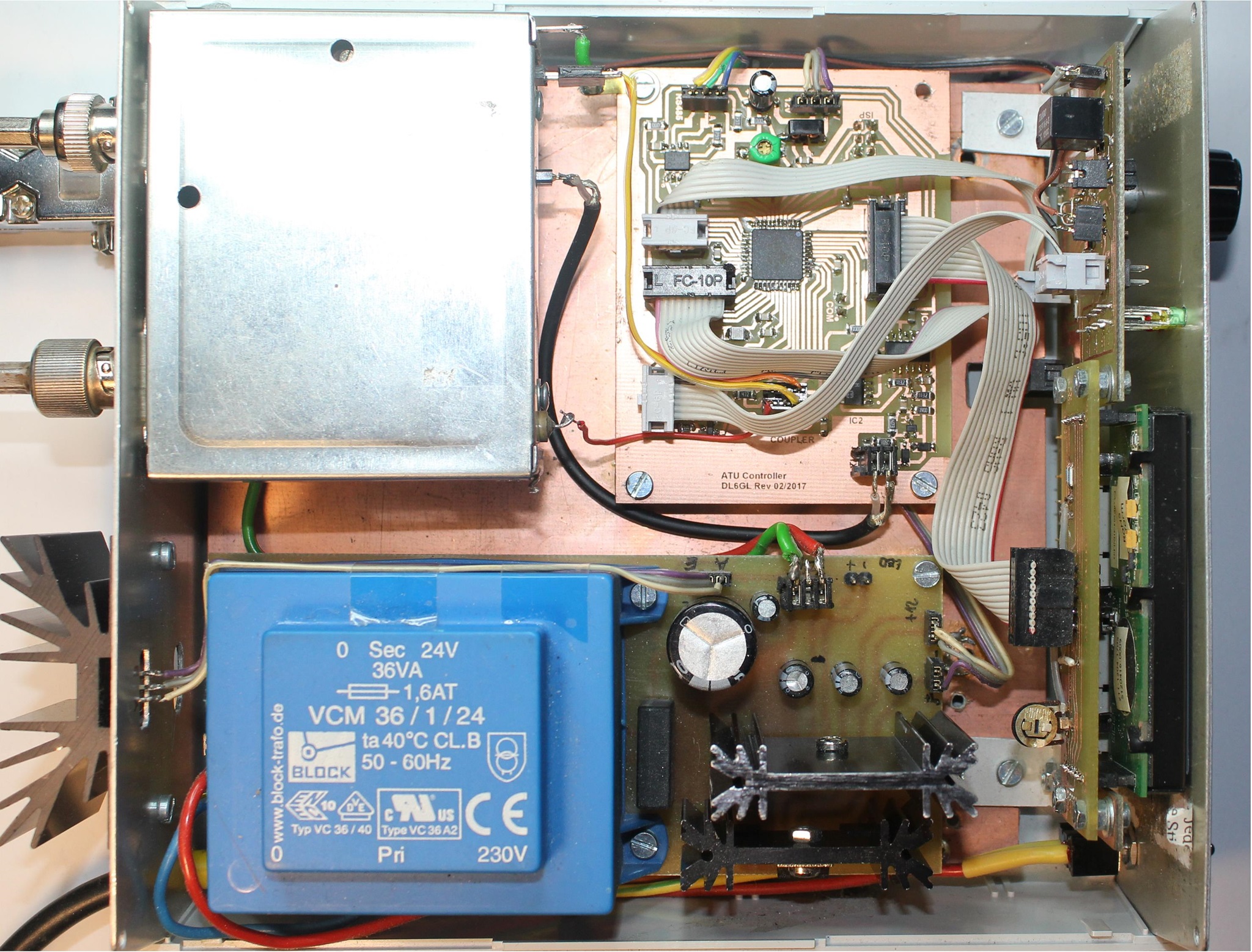
Abb. 1.10: Innenansicht des Steuergerätes.
Für einen SWR-Koppler mit QRO-Dimensionierung ist noch genügend Platz im Gehäuse.
| « Automatischer symm. Antennentuner-ATU 2017 | TOP | » 2 Remote Unit |